





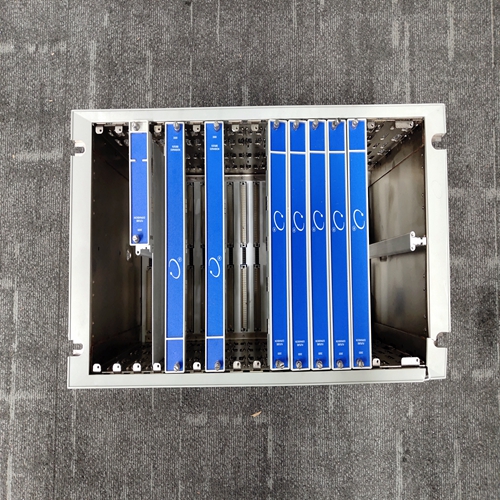
BENTLY 3500/05-01-02-00-00-00框架
(0-100%范圍)說明了典型的自動調諧練習。變量1表示閥門,變量2表示過程。在這個例如,該過程具有標準偏差小于0.5%的噪聲。已設置%HYS(%滯后帶)
設置為0.75%,并設置%DEV(%與設定點的偏差,該偏差應設置為%HYS值的至少4倍)至3%。
自動調諧器將在第一個1期間使用初始閥門步長(在控制器功能塊中設置為%步長)-1/2個周期來學習過程的近似增益。然后,它將在以下步驟的剩余時間內調整閥門步長:用于維護%DEV設置的自動調整練習。此測試結束時,建議的設置為并進行20%的設定點改變,以說明控制器的調整。
當為下一次自動調諧練習啟動自動調諧時,它將使用上一次學習的過程增益確定閥門步長的練習,除非:控制器塊中復位時的參數已存儲為是,在第一次測試期間出現警告,或電站已通電。過程噪聲-可能會導致自動調諧不會產生周期性閥門循環。自動調諧器將完成練習,但結果可能不令人滿意。這在圖2中的第一個自動調整練習中進行了說明這是與圖1相同的過程,但%HYS設置為0.5%。如果這些結果發生在控制器%
HYS已設置為A(自動設置滯后)
控制器可能難以獲得良好的噪聲系數,并且應考慮手動輸入%HYS參數。%HYS值應至少增加到噪聲標準偏差值的兩倍。在噪聲幅度非常大的情況下,濾波器打開應增加模擬輸入,以最小化控制器看到的噪聲幅度。價值%DEV參數應設置為%HYS值的至少四倍,以獲得最佳結果。
穩態條件-必須在開始自動調諧練習之前為過程和控制器建立。自動調諧器可以在手動或自動模式下啟動。當當前閥門信號達到以下狀態時,達到穩定狀態:使過程達到其當前值,并且設定點等于過程。當不處于穩定狀態時,閥門周期將不是對稱的,如圖2中的第二次調整練習所示,或者,在更壞的情況下
閥門可能根本不循環。如果閥門確實循環,盡管不是對稱的,但仍會有足夠的調節結果獲得。自動調諧警告-不終止自動調諧練習,通常通過增加%來消除HYS和/或%DEV設置。在某些情況下,它們可能是由以下過程中發生的負載變化引起的:自動調諧練習。自動調諧仍將導出推薦的調諧值,但不會自動導出如果請求該功能,則傳輸到控制器。按下確認鍵可清除警告按鈕
Chart 1 (0-100% range) illustrates a typical autotune exercise. Variable 1 is the Valve and 2 the Process. In this
example, the process has noise with a standard deviation of less than 0.5%. The % HYS (% hysteresis band) is set
to 0.75% and the % DEV (% deviation from setpoint which should be set to at least 4 times the % HYS value) is set
to 3%.
The autotuner will use the initial valve step size (set as % STEP in the controller function block) during the first 1-
1/2 cycles to learn the approximate gain of the process. It will then adjust the valve step size during the remainder of
the autotuning exercise to maintain the % DEV setting. When this test concludes, the recommended settings are
transferred to the controller and a 20% setpoint change is made to illustrate the controller tuning.
When the autotuner is started for the next autotune exercise, it will use the process gain learned during the previous
exercise to determine the valve step size unless: the parameter AT RESET in the controller block has been stored as
YES, warnings occurred during the first test, or the station has been power cycled. Process Noise - could have an effect where the autotuner will not produce periodic valve cycles. The autotuner will
complete an exercise but results may not be satisfactory. This is illustrated in the first autotuning exercise in chart 2
which is the same process as chart 1 but the % HYS was set at 0.5%. If these results occur when the controller %
HYS has been set to A (auto set hysteresis) the controller may be having difficulty deriving a good noise figure and
manual entry of the % HYS parameter should be considered. The % HYS value should be increased to at least
twice the standard deviation value of the noise. In cases where the noise amplitude is extremely large, the filter on
the analog input should be increased to minimize the amplitude of the noise seen by the controller. The value of the
% DEV parameter should be set to at least four time the % HYS value for best results.
Steady State Conditions - must be established for the process and controller prior to starting an autotune exercise.
The autotuner can be initiated while in manual or auto. Steady state is reached when the present valve signal has
brought the process to its present value, and the setpoint is equal to the process. When not at steady state, valve
cycles will not be symmetrical as illustrated in the second tuning exercise in chart 2 or, as a worse case situation, the
valve may not cycle at all. If the valve is does cycle, although not symmetrically, adequate tuning results will still
be obtained. Autotuner Warnings - do not terminate the autotune exercise and are normally eliminated by increasing the %
HYS and/or the % DEV settings. In some cases, they may have been caused by load changes that occurred during
the autotune exercise. The autotuner will still derive recommended tuning values but they will not automatically be
transferred to the controller, if that feature was requested. The warnings can be cleared by pressing the ACK
button.

